英語
英語  ドイツ語
ドイツ語  日本語
日本語 クラッチロボット
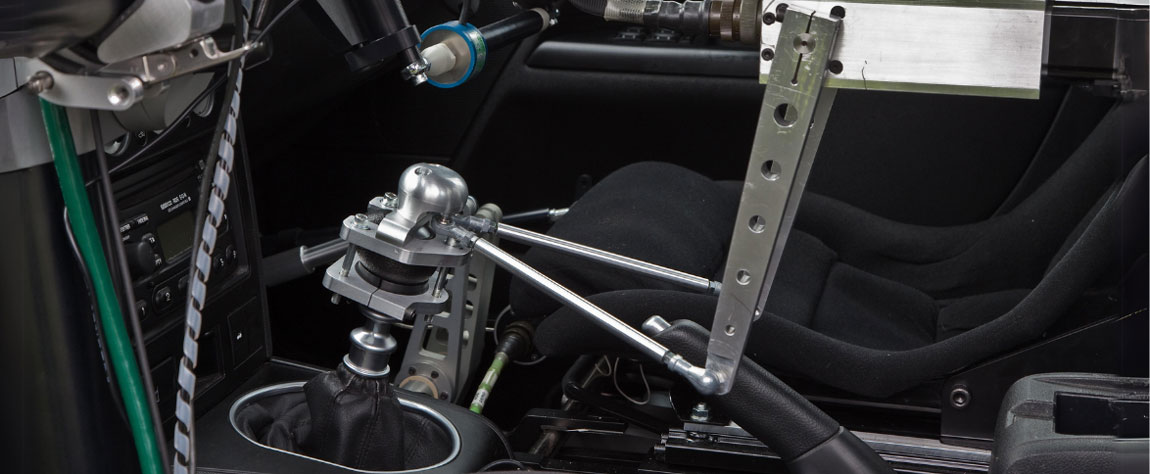
スロットルやギアチェンジャーと緊密に連携し、高い精度と再現性で車両のクラッチペダルを制御します。クラッチロボットは、マニュアルトランスミッション車のギアチェンジと引き離しを自動化するソリューションの一部です。
スロットルやギアチェンジャーと緊密に連携し、高い精度と再現性で車両のクラッチペダルを制御します。クラッチロボットは、マニュアルトランスミッション車のギアチェンジと引き離しを自動化するソリューションの一部です。
CBARペダルロボットシリーズを補完するためにデザインされたクラッチロボットは、位置とペダルスピードを精密に制御し、クラッチとデクラッチプロファイルを完全にカスタマイズすることができます。この先進的なシステムにより、マニュアルギアシフト車をロボット操作することが可能になり、有人および無人運転の両方のアプリケーションに対応することができます。クラッチロボットは、正確で再現性のある位置入力を実現するために、精度の高いサーボ制御を提供します。
クラッチロボットは、マニュアルトランスミッション車用のギアチェンジロボットとシームレスに統合され、車両を停止状態から加速、停止、バックさせることができます。操作はロボットコントローラー(RC)ソフトウェアを使用してプログラムされ、ドライビングロボットを使ったトラック試験の計画、実行、レビューを管理します。RCソフトウェアを使用することで、クラッチの噛み合わせポイントや引き離し速度の制御をロボットに簡単に学習させることができ、CANのRPMフィードバックと組み合わせることで、スムーズな制御を実現します。
クラッチロボットは、弊社の他のペダルロボットと完全に統合され、カスタマイズ可能な速度プロファイルを提供します。
"*" indicates required fields
You need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More Information